事業概要
手術支援ロボットの研究分野では,術者や患者の負担を減らすため,リーダ・フォロワ型のシステムから,自律的に動作するロボットの制御方法に関して注目が集まっている.自動運転技術では自動車の自律度を示す6段階の指標(自律レベル)が定義されており,これをベースとして手術支援ロボットの自律レベルも定義されている.ヒトだけで手術を行う場合をレベル0とした場合,リーダデバイスの動きから術者の手先の震えを除去してフォロワロボットに伝えるシステムの自律レベルはレベル1に分類される.腹腔鏡下手術においては,機械学習の性能が飛躍的に進歩したことで,特定のシーンでロボットが自律して動作するレベル2,もしくはそれよりも高いレベルへの取り組みがなされている.
これまでに縫合操作やその補助,組織のカウンタートラクション,カッティングといった手技の自律化の例があるが,これらは腹腔鏡を通して得られる画像に基づいている.腹腔鏡の高解像度化やステレオ内視鏡を用いた3次元化が認知性能を高める主な方法であり,前者では8K内視鏡が存在し既に高い性能を有していると言える.ただし,あらゆる場面の手術手順,解剖学,器具などをリアルタイムかつロバストに認知できることが直近の課題とされており,鉗子が重なる場面,鉗子が画面から外れる場面や腹腔鏡が汚れる場面のように死角ができる状況では,冗長でないことから安全性担保には不十分と言える.術中MRIや術中CTはこの候補と言えるが,装置が大型であるなど欠点も存在する.
本事業では,曲面形状ロボットを用いた手術支援ロボットのための情報取得システムを開発する.鉗子ロボットなどの手術支援ロボットと情報取得システムを併用することで,手術支援ロボットの自律動作の成功率向上が見込め,その結果,手術時間の短縮,術者と患者の負担の軽減につながると期待できる.
開発した主な装置・システムと得られた成果
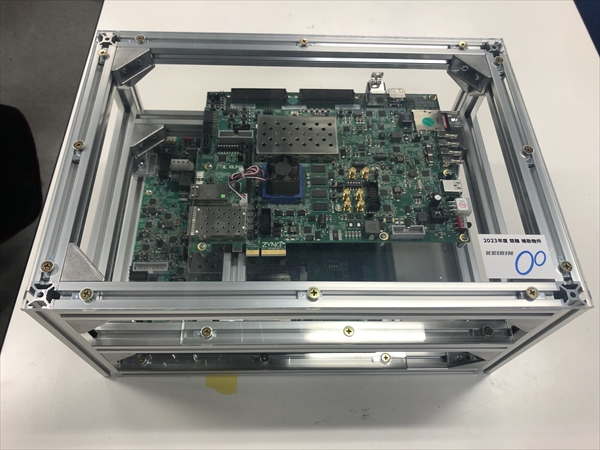
映像送信回路
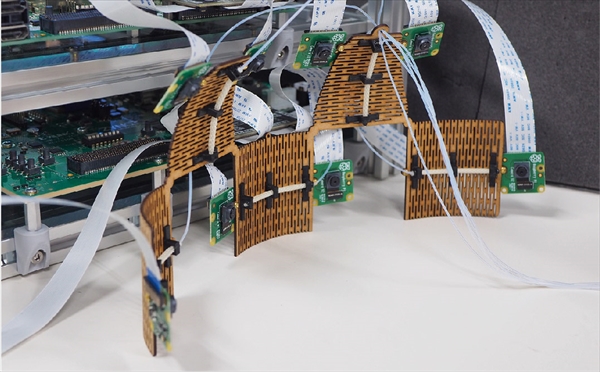
8つのカメラを搭載した曲面形状ロボット
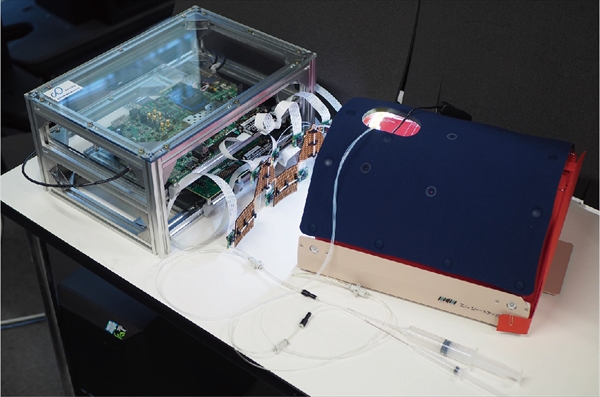
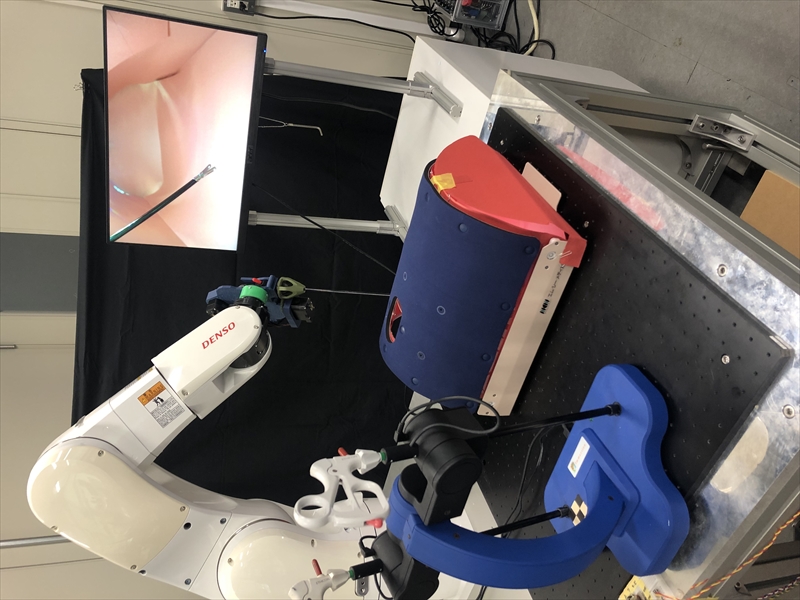
情報取得システムとドライボックスを組合わせた実験環境
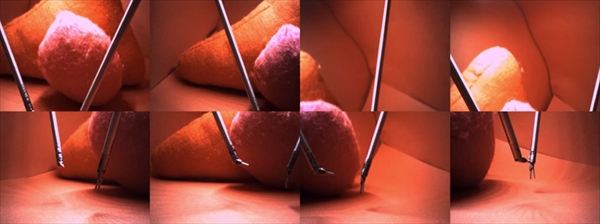
情報取得システムで得られた映像
手先に鉗子を搭載したマニピュレータ
補助事業で得られた成果についての詳細は以下の広報資料をご参照ください.
補助事業概要の広報資料
国内学会発表
“手術支援ロボット自律化のための術野空間情報取得システムの提案”,
田所聖崇, 黒田善明, 佐藤寛之, 丸川可南子, 西川敦, 岩本憲泰, 第24回計測自動制御学会システムインテグレーション部門講演会(SI2023), 12月15日, 2A2-02, 新潟
受賞
第24回計測自動制御学会システムインテグレーション部門講演会(SI2023) 優秀講演賞,
表彰者一覧
本研究は,公益財団法人 JKA 競輪補助金による事業(機械振興補助事業 研究補助 個別研究 2023M-289)です.

