1. はじめに
私達の骨組みとなっているたくさんの骨。
大人になってしまうと、骨はずっと同じ形をしているように思えます。 そのため、骨はただのカルシウムの塊なんじゃないか、という錯覚をおこします。 でも、ほんとうはそんなことはありません。
骨は石灰化した骨細胞の集合体であり、絶えず吸収と形成を繰り返しているのです。この吸収と形成のバランスが変わることによって、スポーツ選手の骨は彼らの筋力に耐えられるようにどんどん太く頑丈になるし、たとえ骨折してもしばらく放っておけばちゃんとくっついてくれます。 このような吸収と形成による適応変化は、骨に限らず生物組織の大半で見ることができます。 たいしたものですよね。
では、手近にある生き物以外のものを見てみてください。
たとえば、今、この文章を表示しているブラウン管か液晶画面。 これらのいわゆる人工物は、自然に形が変わることはありませんし、ひとたび骨折のような「破壊」が生じたら、誰かが接着剤で直さない限り元には戻りません。 生物のように環境に適応してどんどん形が変わり、もし一部が壊れてもそこが自動的に直ってしまうような人工物があったら面白いと思いませんか?では、生物と人工物ではどうしてこのような違いがあるのでしょう?
それは、先述したように生物は小さな細胞がたくさん集まってできており、それぞれの細胞が消えたり(吸収)増えたり(形成)するからです。
だったら、細胞を人工的に作り、その細胞がいくつも結合することによって構造物が組み上がればいいですよね。
私達は人工的な細胞(セル)による構造物の自動生成を計算機シミュレーションで試みています(「セル・オートマトンモデルによる構造物の自動生成」参照)。 そして、これを機械的に実現することが、この研究の目的です。2. セルロボットとは
細胞を人工的に作る手法はたくさんあると思います。 一つには今話題のバイオテクノロジーによって、生物の細胞を改造する方法が考えられます。 また、細胞のような組織を化学反応によって作ることも可能かもしれません。
私達は細胞をロボットで作ってみることにしました。 これをセルロボットと呼んでいます。皆さんは「細胞はすんごい小さい」というイメージを持っていらっしゃるかもしれません。 でも、すんごい小さいロボットを作るのはとっても大変です。 そのため、細胞のように同じものがいっぱい組み合わさって構造物を組み立てる、本物の細胞よりもだいぶ大きいロボット、が私達が開発しているセルロボットです。
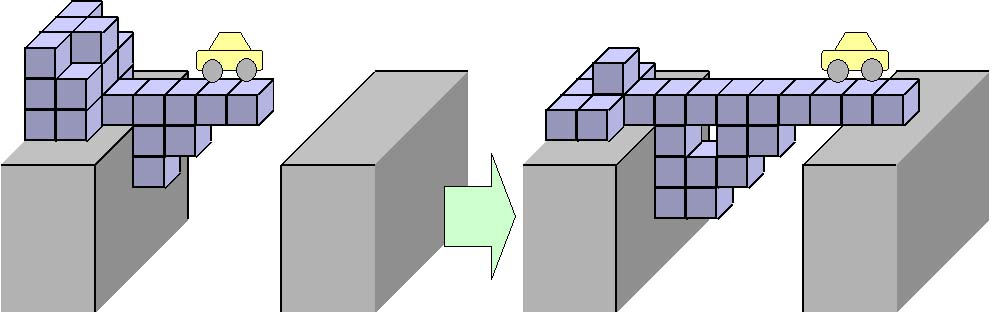
セルロボットの活用例を考えてみましょう。 どこかの惑星を探査する状況をイメージしてください。 この惑星の地形はずいぶん険しく、崖がいっぱいあります。 いろんな場所に行くためには橋をいっぱい作らないといけないのですが、ロケットには大きな橋をたくさん作るための材料を積むスペースはありません。 このような状況でセルロボットが活躍します。
下図のように、崖の反対側に行きたい時には、同じ形状のセルロボットがいくつか結合して橋のような構造物を組み立てます。 移動が終わったら、残ったセルロボットもこの上を通って反対岸へ集合し、最後に橋梁構造を壊しながら全体が反対岸へ集ります。
下図では、わかりやすいように黄色い自動車で移動を示し、紫色の立方体で示したセルロボットで橋を組み立ててみました。 しかし、生物の細胞には様々な種類があります。 それと同じように、構造物の要素となるセルロボットや探査装置が組込まれたセルロボット、通信装置を持つセルロボットなど、セルロボットにも役割分担を与えれば、惑星探査というミッションの全てをセルロボットが行うことも可能となるでしょう。
(惑星探査のような極限環境での群ロボットの利点を「親子型群ロボットの協調行動」でも述べていますので参考になさってください。)
いろいろと夢は膨らみますが、現在はその準備段階です。 様々な機構によるセルロボットを設計し、これを制御することによって、セルロボットが構造物を構築するために必要な機能や機構を開発しています。
3. 空気圧駆動型セルロボット
私達が開発しているセルロボットの一つ目は、空気圧によって回転して移動するロボットです。
下図に示すように、ロボットの各面には蛇腹(ジャバラ)が設置されており、そこに空気圧を加えると蛇腹が伸びて隣合うロボットを押し出す力となります。
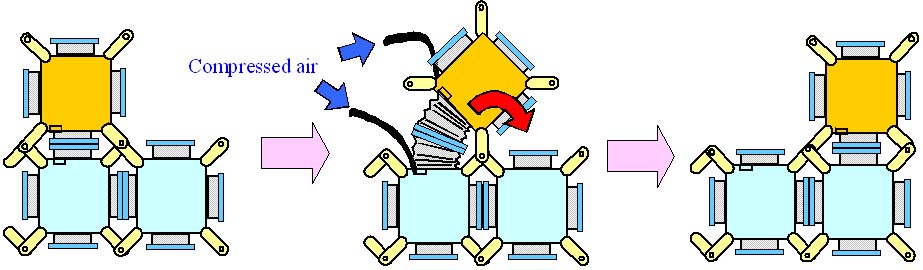
蛇腹は空気圧をかけるとそのまま真っ直ぐ伸びようとします。 そのため、移動するロボットを蛇腹が正しく押さないことが考えられます。 そこで、蛇腹を選択した方向へ曲げて伸ばす機構を開発しました。 これにより安定したセルロボットの移動が可能となりました。
また、蛇腹先端にエンドエフェクタを取り付け、蛇腹をロボットアームとして利用することも考えています。4. スライド移動型セルロボット
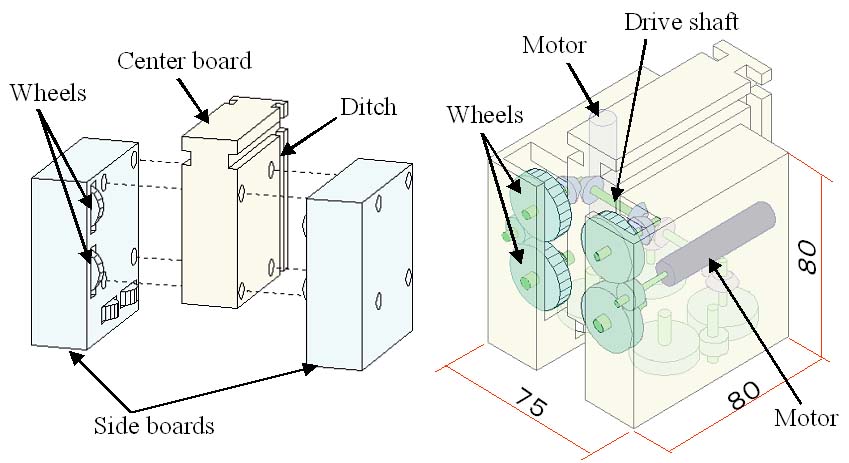
私達が開発しているセルロボットの二つ目は、複数のセルロボットが並んで作るレールの上をスライドして移動するロボットです。
このスライド移動型セルロボットとして様々な機構をこれまでに考えてきましたが、どれも機構が複雑になってしまい、多数のロボットが必要なセルロボットには適さないものとなってしまっていました。そこで現在開発しているセルロボットは、下図のように機構をできるだけ単純化し、プラモデル感覚で組み立てられるものを目指しています。
(初稿 2002年4月 小関道彦)
